Viewing Panel¶
The viewing panel displays the 3D model geometry and other defined components and is located on the right-hand side of M-Star Pre.
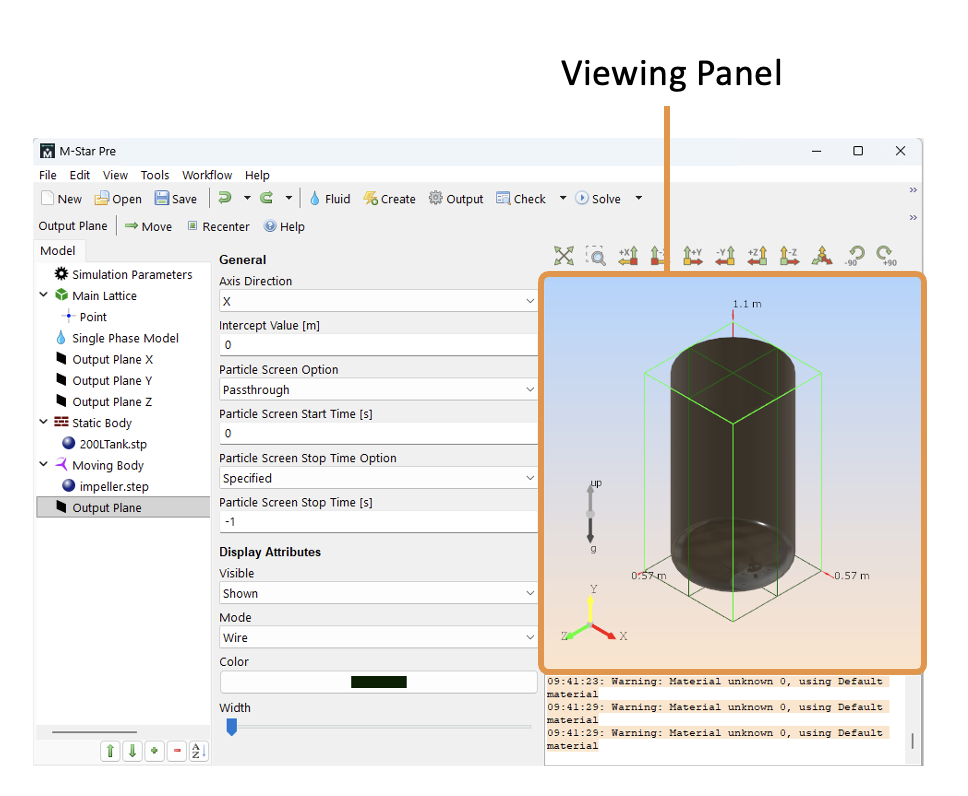
The viewing panel also presents the direction of gravity and the system basis vectors used to define the object orientations in the simulation.
World Origin and Reference Vectors¶
The world origin defines the reference point for all geometry and vector quantities in the system.
By default, the world origin is fixed at the coordinates (0, 0, 0), and all positions are defined relative to this point. The world origin also establishes the root of the x-, y-, and z-basis vectors, which form the orthogonal basis set defining three-dimensional space in the model.
The x-basis vector points in the (1, 0, 0) direction, the y-basis vector points in the (0, 1, 0) direction, and the z-basis vector points in the (0, 0, 1) direction. The world origin and its associated basis vectors can be visualized and toggled on or off using the Toggle World Origin  button.
button.
The dihedron (in gray & black) shows the up direction and the direction of gravity relative to the trihedron. You can adjust the gravity vector in the main lattice property grid.
The trihedron (in green, red, & blue) defines the basis x-, y-, and z-unit vectors within the system. These basis vectors are used to define the orientation of system geometry, the directions of any motion vector in the system, the velocity along any boundary condition surface, and the placement of moving inlets and outlets.
Certain lattice elements, such as inclusion zones, must be aligned with these basis unit vectors.
Note
The viewer can snap to these different orientations using the navigation icons.