 DEM Particles¶
DEM Particles¶
Introduction¶
Discrete Element Particles extend the functionality of inertial particles to include particle-particle contact mechanics. These particles are useful for performing discrete element method (DEM) simulations as well as coupled CFD-DEM simulations. Typical applications include systems with high solids concentrations such as slurries, granular flows, and particle packing problems.
Unresolved DEM Particles
DEM interactions are typically described using a Hertz contact model, although more sophisticated models are available. CFD-DEM simulations are an advanced modeling paradigm and should be used purposefully. They typically require smaller time steps to remain numerically stable and can increase runtimes.
Like inertial particles, DEM particles can be coupled to fluid scalar fields and participate in chemical reactions. DEM particle momentum can likewise be either one- or two-way coupled to the fluid. As with both inertial and tracer particles, DEM particles can also be assigned particle variables, which can be used to investigate the system from the perspective of a moving particle (e.g., cell or crystal grain).
Unlike non-interacting inertial and tracer particles, DEM particle addition is limited by the available system volume because DEM particles consider pair-wise interactions. Care must therefore be taken to avoid unphysical overpacking, which occurs when the number of particles added to a child geometry exceeds the volume available in the simulation domain, resulting in particle-particle overlap
Resolved DEM Particles
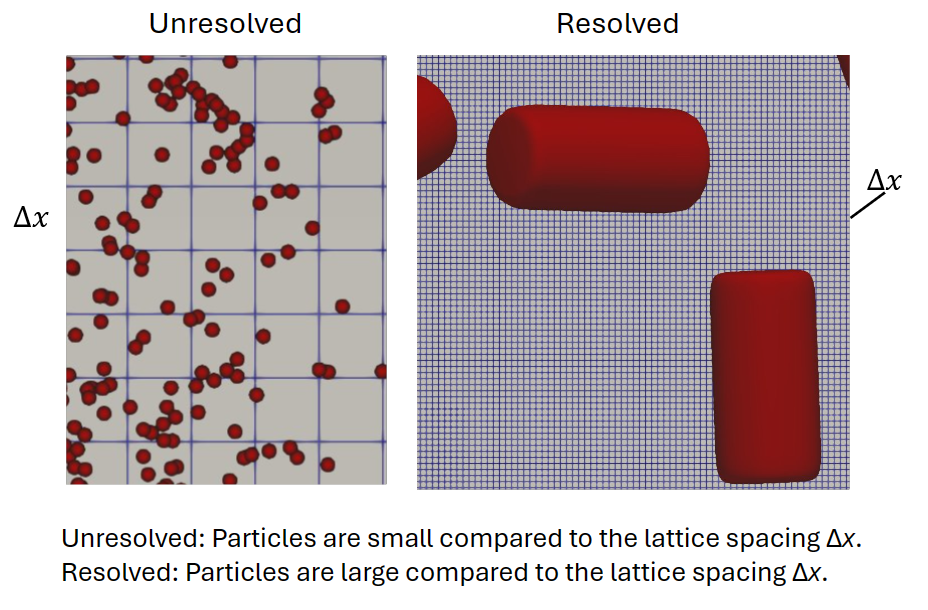
Both unresolved and resolved DEM particle representations are available. Unresolved particles are small compared to the lattice spacing, and the flow field around the particle is not explicitly resolved. Instead, for unresolved particles, interactions (e.g., particle drag, lift) are modeled using empirical correlations. Resolved particles are large compared to the lattice spacing, meaning the flow field/fluid boundary layer around the particle is resolved explicitly.
For more on this topic, check out these webinars.
Adding DEM Particles¶
When adding particles to a system, there are two factors to consider: (1) the number of particles entering the system, and (2) the location of the particles entering the system.
The number of particles entering the system is defined by an injection rate and an injection duration. Pay close attention to the appropriate number of particles added to the system as very large particle counts can slow performance. Various injection options are provided for defining these parameters.
The location of the particle injection is typically defined using an injection zone, an inlet boundary condition, or a background injection:
A particle injection allows users to define custom injection regions with local injection rates, injection size distributions, and initial particle compositions that differ from those defined on the particle parent. Particle injections allow for differentiated particle characteristics within a particle family. Children geometry can be added to the injection to control where particles are added to the system.
An inlet boundary condition represents the superposition of particles on the fluid field along the boundary condition surface. Boundary condition flow sweeps these particles from the initial positions along the boundary condition to other regions in the system.
A background injection produces a uniform distribution of particles across the full fluid field. This addition, if applied at the start of a process, represents a system with an initially well-dispersed ensemble of particles.
Discrete element particles can also enter the system through Eularian conversion and volumetric generation via a user-defined function. Eularian conversion is used to model fluid-to-fluid conversion processes, as realized during jet breakup, air entrainment, and two-fluid dispersion processes. Volumetric generation is used to model particle nucleation, particle crystallization, and so forth.
Note
Use caution when adding more than a billion particles. System memory limits the total number of particles that can be tracked. On a single workstation, this limit is 50–100 million particles. On a GPU cluster, this limit is about 1 billion particles.
Warning
The number of DEM particles added to a child volume cannot exceed the maximum solids packing fraction within the child volume. For most systems, this maximum solid packing fraction is around 60–70%. If the requested particle injection or feed rate exceeds this maximum value, the code will not be able to fit all the requested particles into the injection volume.
For dump-type injections, overpacking conditions will cause the code to exit with an error and report the maximum particle overlap. High initial overlap values, which imply particle overpacking, can be avoided by either (i) increasing the size of the injection volume or (ii) reducing the number of particles added to the injection geometry.
For feed-type injections, overpacking conditions will cause the code to produce a warning when the realized injection rate does not achieve the set injection rate. The difference between the realized particle addition and the target particle addition will be reported. Per the engineering judgment of the user, small differences between the set and realized particle injection may be acceptable. To reduce this difference, however, users can either (i) increase the size of the injection volume, (ii) reduce the particle feed rate into the injection geometry, or (iii) increase the velocity of the fluid transporting particles away from the injection geometry.
Property Grid¶
General¶
- Density
kg/m 3 | The density of the particles added via this injection.
Forces and Fluid Coupling¶
Discrete element particles are modeled as Lagrangian objects that move according to Newton’s second law. Within this framework, the time-evolution of the particle acceleration vector is linked to the sum of the external forces acting on the particle via the particle mass. The particle mass is calculated automatically from the instantaneous particle density and diameter.
Both unresolved and resolved DEM particle representations are available. Most CFD-DEM simulations use an unresolved particle representation. Unresolved particles are small compared to the lattice spacing, and the flow field around the particle is not explicitly resolved. As such, for unresolved particles, interactions (e.g., particle drag, lift) are modeled using empirical correlations. These interactions can be either one-way or two-way coupled to the fluid.
Resolved particles are large compared to the lattice spacing, meaning the flow field/boundary layer around the particle is resolved explicitly. Resolved models do not evoke any user-defined drag or lift coefficient; rather, since the flow is resolved, these forces are computed directly from the fluid field surrounding the particle. The fluid/particle forces are automatically two-way coupled. Resolved DEM simulations are an advanced modeling technique which typically require a large simulation resolution.
For both representations, custom forces and/or additional external forces can be defined via a UDF. For more discussion of these fluid particle forces, see the additional forces and fluid coupling overview.
- Representation
This option specifies how the particles will be represented in the system.
- Unresolved
Particles are assumed to be small compared to the lattice spacing. Fluid forces are calculated from user-set drag/lift relationships.
- Resolved
Particles are assumed to be large compared to the grid spacing. Fluid forces are calculated directly from the flow field.
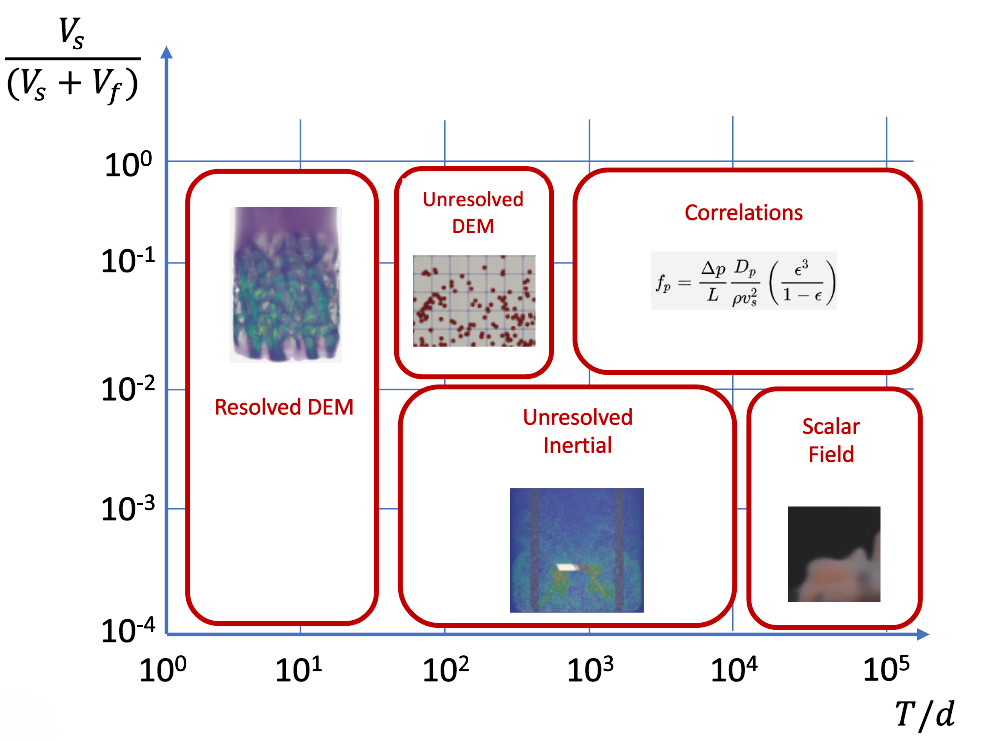
The following graph indicates when to use resolved versus unresolved particles.
If Unresolved Particles are selected, the following options will appear:
See additional forces and fluid coupling overview.
- Gravity/Buoyancy Force
This force represents the net effect of gravity and buoyancy.
- Virtual Mass
The virtual mass refers to the virtual increase in the effective mass of a particle moving through fluid due to the inertia of the surrounding fluid.
- Lift (Saffman)
The Saffman lift force arises when a particle experiences a cross-flow induced by the rotation of the particle.
- Drag Force Model
The drag force is the resistance encountered by particles as they move through the fluid medium.
- Two Way Coupling
Two-way coupling describes the mutual interaction between fluid flow and particle motion.
- Fluid-Particle Force UDF
This UDF defines custom vectors for fluid and external forces acting on particles.
Note
Interfacial transfer and scalar coupling are not currently supported for resolved particles.
Important
The high stiffness associated with solid particles means that CFD-DEM simulation typically requires a smaller solution timestep than CFD simulations without DEM particles. In general, small and stiff particles (e.g., higher Young’s modulus) require smaller solution timesteps than larger and less stiff particles. If the selected timestep is too large—meaning the particle dynamics are not stable—the simulation will lose particles over the course of the simulation. The code will report this behavior. This issue can be typically be resolved by either (1) decreasing the particle Young’s Modulus, (2) increasing the particle size, or (3) decreasing the simulation timestep. See the Choosing a DEM Timestep guide for more discussion.
If a static body is present, the following section will launch:
Static Body Interaction¶
This parameter specifies how each particle set interacts with each solid body family. When bounce interactions are specified, the contact force is calculated using a Hertz contact model. Pass through and stick boundary conditions can also be specified.
- Static Body Option
This parameter specifies how each particle set interacts with each solid body family.
- Bounce Simple
Particle-solid interactions are calculated using the Hertz contact model. The properties of the solid wall, as used to calculate overlap and stiffness, are assumed to be:
- Static Body Poisson Ratio
0.3
- Static Body Young’s Modulus
GPa | 0.1
- Static Body Wall Coefficient of Restitution
0.1
- Static Body Wall Sliding Friction Coefficient
0.5
- Bounce Custom
Particle-solid interactions are calculated using the Hertz contact model. The properties of the solid wall, as used to calculate overlap and stiffness, are defined by the user. Default values are the properties evoked when using the Bounce Simple interaction option.
- Static Body Poisson Ratio
0.3
- Static Body Young’s Modulus
GPa | 0.1
- Static Body Wall Coefficient of Restitution
0.1
- Static Body Wall Sliding Friction Coefficient
0.5
- Stick
The particles stick to the solid surface. No physical properties are specified, and the particles remain stuck to the surface through the simulation. The motion control option, combined with an appropriate set of custom particle variations, should be used if more sophisticated stick and/or stick/release conditions are required.
- Pass Thru
The particles do not interact directly with the solid body family.
If a moving body is present, the following section will launch:
Moving Body Interaction¶
This parameter specifies how each particle set interacts with each moving body family. When bounce interactions are specified, the contact force is calculated using a Hertz contact model. Pass through and stick boundary conditions can also be specified.
- Moving Body Option
This parameter specifies how each particle set interacts with each moving body family.
- Bounce Simple
Particle-solid interactions are calculated using the Hertz contact model. The properties of the moving wall, as used to calculate overlap and stiffness, are assumed to be:
- Moving Body Poisson Ratio
0.3
- Moving Body Young’s Modulus
GPa | 0.1
- Moving Body Wall Coefficient of Restitution
0.1
- Moving Body Wall Sliding Friction Coefficient
0.5
- Bounce Custom
Particle-solid interactions are calculated using the Hertz contact model. The properties of the moving wall, as used to calculate overlap and stiffness, are defined by the user. Default values are the properties evoked when using the Bounce Simple interaction option.
- Moving Body Poisson Ratio
0.3
- Moving Body Young’s Modulus
GPa | 0.1
- Moving Body Wall Coefficient of Restitution
0.1
- Moving Body Wall Sliding Friction Coefficient
0.5
- Pass Thru
The particles do not interact directly with the moving body family.
Particle-Particle Interaction¶
These parameters define how particles interact with other particles. This section is only presented for Discrete Element and Resolved Particle types. See additional DEM particle overview.
- Interaction Type
Type of inter-particle collisions.
- Hertz Contact
Hertz contact model with user-defined particle properties listed below.
- Young’s Modulus
GPa | Young’s modulus characterizes the tensile/compressive stiffness of the material. It is defined as the ratio of the stress (force per unit area) applied to the resulting axial strain. Typical values range from \(10^{-4}–10^3\) GPa. As discussed above, increasing the Young’s modulus will decrease the simulation timestep required to keep the contact mechanics stable.
- Poisson’s Ratio
Poisson’s ratio characterizes the deformation of a material in directions perpendicular to the direction of loading. Typical values range from 0.2–0.3.
- Coefficient of Restitution
The coefficient of restitution is the ratio of the relative velocity of separation after a collision to the relative velocity of approach before a collision. It can range from 0 (for a perfectly inelastic collision) to 1 (for a perfectly elastic collision).
- Sliding Friction Coefficient
This coefficient is the ratio of the force of friction between two particles and the force pressing them together. Typical values of the friction coefficient range from 0.2–0.8.
- Track Rotation
When this option is enabled, the torque, angular acceleration, and angular velocity of the DEM particles will be considered (in addition to the linear forces, translational acceleration, and linear velocities). These physics are particularly important for simulations with advanced contact mechanics involving irregularly shaped particles.
- Off
Do not consider particle rotation.
- On
Consider particle rotation.
- Rolling Friction Coefficient
This coefficient represents the ratio of the rolling resistance to the normal/contact force. This coefficient typically ranges from \(10^{-3}–10^{-4}\).
- Custom
A user-defined pairwise contact model. This expression defines the force vector on each particle as a function of interactions with nearby particles. This expression can be a function of particle properties (i.e., overlap distance, velocity, acceleration, diameter, and custom variables), and local fluid properties. Importantly, the force will only be active if there is a finite overlap force between the particles.
- Interaction Search
This search determines which particles are close enough to interact with one another. Rather than checking every particle against all others, the solver identifies neighboring particles and computes interactions only within that local neighborhood.
- Overlapping
This applies the UDF only to particles that are in contact or overlapping. The interaction is evaluated only when particles are touching.
- Specified Cutoff
This applies the UDF to any pair of particles within a user-defined interaction distance, even if the particles are not touching. This is commonly used for forces that act over a distance, such as electrostatic interactions.
- Interaction Cutoff
m | Particles with a separation distance greater than this cutoff will not be considered in any pair-wise interactions.
- Inter-Particle Force UDF
N | This UDF defines the three components of a custom interaction force vector between two colliding DEM particles. Three outputs must be defined within the UDF: floating point variables name
fx,fy, andfz. These output variables describe the x-, y-, and z-components of a custom interaction force vector between two colliding DEM particles.In addition to the local fluid properties, the UDF input includes the properties (position, velocity, diameter, etc.) of both particles participating in the contact event as input values for evaluating the contact force UDF. In most cases, the line-of-action of the force vector will align with the particle-particle separation vector. Both particles participating in the reaction will experience the same force magnitude, although opposite in directions. This is a particle-based local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.
Download Sample File:
Inter-Particle Force- None
No particle-particle interactions are defined. The only interactions defined are between DEM particles and the wall.
Breakup/Coalesce¶
Particle breakup and coalescence can be modeled using either discrete or parcel-based representations.
In the discrete representation, particle breakup occurs on a particle-by-particle basis and generates a new particle that is explicitly tracked in the simulation; this new particle inherits the properties of the mother particle from which it was broken off. Particle coalescence is regulated at the level of individual particle pairs by comparing the approach Reynold’s number to a critical coalescence parameter. Coalescence events reduce the number of explicitly tracked bubbles.
In the parcel-based representation, both particle breakup and coalescence are regulated implicitly by adjusting the number scale associated with each parcel. Changes in diameter are informed by the local fluid properties which, when combined with surface tension and density, define an equilibrium particle diameter. With this approach, the number of explicitly tracked particles does not change due to breakup or coalescence events. See additional breakup/coalesce overview.
- Breakup Enabled
Particle breakup typically occurs on the level of individual particles. It is informed by the physical properties of the particle and the kinematic properties of the fluid.
- Coalesce Enabled
Coalescence typically occurs at the level of particle pairs. It is informed by the kinematic properties of the two particles.
Interfacial Mass Transfer¶
Interfacial mass transfer is calculated on a particle-by-particle basis using the local and instantaneous fluid and particle properties. This can be represented as either a convective transfer coefficient, \(k_L\), or a particle dissolution rate. In principle, the convective transfer coefficient and the dissolution rate describe very similar physical transport processes. In practice, a convective transfer coefficient is typically applied to gas bubbles and a dissolution rate is applied to solid particles.

Mechanically speaking, the convective transfer coefficient describes the rate at which mass is transferred (via convection) through the fluid boundary layer surrounding the particle. This rate is often written in terms of the local fluid energy dissipation rate, fluid viscosity, and fluid diffusion coefficient; although, in many cases a constant transfer coefficient may be suitable.
Theoretically speaking, most convective mass transfer models are developed under the assumption that the fluid immediately surrounding the particle remains fully saturated throughout the transport process. The rate at which mass is transferred into the system is therefore a function of the rate at which the saturated fluid adjacent to the bubble surface can be engulfed into the fluid bulk. These transfer functions can be derived from semi-empirical boundary layer theory.
Conversely, particle dissolution rates are developed under the assumption that the dissolved species concentration is low relative to the solid phase concentration. As such, the transfer rate is often related to the system temperature and the physiochemical properties of the solid rather than to the convective properties of the fluid surrounding the solid. In many cases, the dissolution rate is set to a constant value determined empirically.
- Framework
This parameter determines whether mass transfer is modeled using the convective transfer coefficient or the particle dissolution rate. These values are calculated on a particle-by-particle basis using the local and instantaneous particle and/or fluid properties.
- Convection
This calculates a convective mass transfer coefficient for each particle. Input to this expression includes the local and instantaneous properties of the particle and surrounding fluid.
- kL UDF
m/s | This UDF defines the convective mass transfer coefficient in the fluid surrounding a particle. One output must be defined within the UDF: a floating-point variable named
kl_{Particles}, where {Particles} is the dynamic name of the particle set. This output value is used when predicting convective mass transfer processes, including mass exchange with coupled scalar fields. This is a particle-based local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.Download Sample File:
kL
- Dissolution
This calculates a dissolution rate for each particle. Possible input to this expression includes the local and instantaneous properties of the particle and surrounding fluid.
- Dissolution Rate UDF
\(\frac{kg}{m^2 \cdot s}\) | This UDF defines the particle dissolution rate, defined here as the rate at which mass is exchanged between the solid phase (particles) and the dissolved phase/solute (coupled scalar field). One output must be defined as within the UDF: a floating point variable named
dr_{Particle Set Name}, where {Particle Set Name} is the dynamic name of the particle set parent.This output value defines the particle-specific dissolution rate. Positive values imply dissolution (mass leaving the particle). Negative values imply precipitation or crystallization. The units on the output variable are kg/m 2 /s. This is a particle-based local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.
Download Sample File:
Dissolution Rate
- None
No mass transfer coefficient or dissolution rate is calculated.
If Interfacial Mass Transfer is on and a scalar is added, the following section will launch:
Scalar Coupling¶
- Coupling Method
This option determines if particle-fluid scalar coupling is active in the simulation and whether it is modeled using built-in or user-defined functions. See additional scalar coupling overview.
- Automatic
Predefined convection and/or dissolution models determine scalar transport rate, calculated on a particle-by-particle basis. The units on these properties depend on system setup and must be dimensionally homogeneous. Transport by convection is calculated from the user-specified convective transfer coefficient, the particle surface area, and the differences between the local concentration and the saturation limit. Transport by dissolution is calculated using the dissolution rate and the particle surface area. The same transport model is applied to all species participating in interfacial mass transfer.
- Custom
User-defined transport models determine scalar transport rate, calculated on a particle-by-particle basis. These models could include the user-defined convective transfer coefficient, the user-defined dissolution rate, particle custom variables, or arbitrary functions of the local fluid/properties. A unique transport model can be specified for each species. The user must confirm that the transport parameters are dimensionally homogeneous.
- None
No particle-fluid scalar coupling is considered. Although a convective transfer coefficient or dissolution rate may be defined, no species will be transferred between the particles and fluid.
If a Thermal Field is added, the following section will launch:
Thermal Coupling¶
The thermal coupling option enables users to model time-dependent particle temperature evolution. Temperature changes may arise from either intra-particle reactions, conditions between particles in contact, or heat exchange between particles and the surrounding fluid. Intra-particle heat generation or consumption is computed on a particle-by-particle basis, allowing each particle to evolve independently according to its local reaction kinetics. Thermal conduction between particles is modeled on a pairwise basis for particles in contact, allowing direct solid–solid heat transfer.
Heat exchange between a particle and the fluid is likewise evaluated individually for each particle, using the local fluid properties in the surrounding computational cells. These particle–fluid heat transfer processes are two-way coupled. The heat flux between phases appears as a source or sink term in the fluid energy equation while simultaneously modifying the particle temperature.
- Track Temperature
This option determines if particle temperature is tracked during the simulation. Temperature changes can be caused by endo- or exothermic intra-particle reactions or heat exchange with the surrounding fluid.
- Off
Particle temperature is not tracked during the simulation.
- On
Particle temperature is tracked during the simulation.
- Initial Temperature
K | This parameter defines the initial temperature of the particles in the set.
- Heat Capacity
J/m 3 K | This parameter defines the heat capacity of the particles. The heat capacity informs how changes in the thermal energy affect changes in temperature.
- Particle-Particle Conduction
This function considers particle-particle conductive heat transfer between DEM particles. This is useful when modeling heat conduction through a fixed bed of DEM particles. The conduction method follows the approach of Mo and Ban (2017).
- Off
Does not calculate particle-particle conductive heat transfer.
- On
Calculates particle-particle conductive heat transfer.
- Conductivity
W/mK | Thermal conductivity of the particles. This parameter is used to link temperature difference to heat flux.
- Youngs Modulus
GPa | Effective Young’s Modulus of the particle pair. This value is used to evaluate the contact area available for conduction.
- Fluid Particle Heat Transfer Coupling Method
The coupling method determines if particle-fluid scalar coupling is active in the simulation and whether it is modeled using built-in or user-defined functions.
- None
No particle–fluid heat transfer is considered. The particle temperature changes only due to endothermic or exothermic intra-particle reactions.
- Convection
When using Convection, the species mass transfer rate between a particle and the surrounding fluid is informed by the heat transfer coefficient, the particle surface area, and the local temperature difference between the particle and the fluid,
\[\dot{q}_{T_p} = h_p A_p (T_p - T_f)\]where \(\dot{q}_{T}\) is the heat transfer rate between particle \(p\) and the surrounding fluid, \(h_p\) is the convective transfer coefficient of the fluid surrounding the particle, \(A_p\) is the area of particle, \(T_p\) is the temperature of the particle, and \(T_f\) is the temperature of the fluid surrounding the particle.
Within this framework, the heat transfer coefficient of each particle \(h_p\) is calculated using the model of Deckwer, which combines Higbie’s penetration theory with Kolmogoroff’s theory of isotropic turbulence,
\[h_p = 0.1 C_v (\varepsilon \nu)^{1/4} \left( \frac{\alpha}{\nu} \right)^{1/2}\]where \(C_v\), \(\nu\), and \(\alpha\) are the specific heat (at constant volume), kinematic viscosity, and thermal diffusivity of the fluid.
- UDF
The user defines a custom fluid-particle heat transfer rate.
- Heat Transfer UDF
W | This UDF defines the heat transfer between particles and the surrounding fluid. One output must be defined within the UDF: a floating-point variable named
Qdot. This output variable defines heat flow between the particle and the surrounding fluid. Positive values imply heat transfer into the particle (from the surrounding fluid). Negative values imply heat transfer away from the particle (into the surrounding fluid). The functional form of the heat transfer model is discussed in the particle heat transfer overview. This is a particle-based local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.
Download Sample File:
Heat Flux
Advanced¶
- Injection Downsampling
This parameter reduces the number of particles added to the system relative to the user-specified dump value, feed rate, initial volume fraction, initial mass fraction, or initial mass. Specifying a downsampling value transforms the particles into sampling parcels. These parcels are characterized by a parcel number scale and parcel diameter. The number scale quantifies the number of equal-sized particles contained within each parcel. The parcel diameter is equal to the particle diameter, as defined by the size distribution. To ensure that the mass represented by the parcels equals the user-specified dump or feed rate, all parcels entering the system are assigned an initial number scale equal to this injection downsampling parameter. The amplifying effects of the number scale on all particle-to-fluid forces, local particle volume fraction calculations, and interfacial mass transfer rates are handled internally and automatically.
With injection downsampling, not all particles are represented explicitly, so systems with injection downsampling are typically paired with the parcel-based breakup and coalescence representation. Thus the model underpredicts pair-wise collisions and explicit coalescence events.
The purpose of the downsampling is to reduce the memory requirements of a simulation. Increasing the number scale (the number of equal-sized particles contained within each parcel) will have the effect of reducing the number of explicitly tracked parcels in the system. The downsampling number should be kept as small as possible, which can minimize the effects of improper course graining and undersampling. In practice, we recommend keeping the number of parcels within the system order-of-magnitude consistent with the lattice count.
This parcel-based representation is also applied to the parcel-based breakup and coalescence representation and discussed in our webinars and reference literature.
For systems with either the Hertz Simple or Hertz Contact model, the effective collision diameter of the particles will increase as the cube root of the initial number scale. This scaling ensures that the volume occupied by the particles/packed bed matches expectations.
In the video below, we illustrate the effects of injection downsampling on particle filling for a simple DEM system. Both cylinders are filled with 1 mm diameter particles. This diameter informs the particle trajectory during free-fall, which is similar in both systems.
When the injection downsampling is set to 1, as shown on the left, 300,000 individual particles are added to the system. The resulting packed bed is approximately 5 cm deep. When the injection downsampling is set to 2, as shown on the right, only 150,000 individual particles are added to the system. The resulting packed bed height is still 5 cm, however, due to the increased effective particle collision diameter imposed as part of the downsampling.
Both systems have similar free-fall dynamics (when the distances between particles are large). Moreover, both systems have a similar final/equilibrium packed-bed shape (where the particles are in constant contact). The downsampled system, however, requires two times less memory to produce similar results.
The injection number scale is numerical convenience introduced to make simulations more computationally tractable. As with other parcel methods, the sensitivity of the simulation predictions to the injection number scale should be considered as part of a grid convergence study.
Download Sample File:
Number Scale DEM- Third Law Number Scaling Exponent
dimensionless | This feature is available when the two-way coupling method is set to “Third Law” and Injection Downsampling is greater than 1. The third-law number-scaling exponent modulates how the number scale influences the third-law particle force on the fluid. The total force from a parcel is calculated as:
\[F_{Parcel} = F_{Particle} \cdot (\text{Number Scale})^{exponent}\]This parameter is valid for values from 0 to 1. Typical values range from 0.5 for a packed bed to 1.0 for free particles in a suspension. As with other parameters that have a tuning impact on a simulation, the sensitivity to the selected value should be tested as part of a simulation study.
Note
The links to Two-way Coupling and Injection Downsampling are specific to each particle type.
- DEM Bounce Method
This options for this method defines how the particles interact with solid bodies. The video below shows the difference between the two options.
- Voxel
This is the default option. It is computationally faster than the Triangle method. The particles interact with the boundaries of the fluid voxels. Smaller particles can get caught on the “steps” for coarser resolutions. As the lattice resolution increases, this effect is minimized.
- Triangle
In this option, the particles interact with the triangles made from the tessellation of the static body surface. This is more computationally expensive than the Voxel option, but results in a more physically realistic interaction with the static body. The size of the triangles used to represent the surface are set using the edit mesh form. The corresponding mesh can be previewed using the Preview Surface Meshes tool.
- Signed Distance
Particles that penetrate the wall are moved back into the system based on the signed distance field they moved into the wall. This correction is numerical and not linked to the physical properties of the particles.
- Initial Velocity Type
By default, particles enter the system with zero velocity. Users may override this setting by assigning the particles a non-zero velocity. This velocity can be specified as either a constant value or a user-defined function of local fluid properties, particle properties, system variables, etc.
- Constant
Under this option, all particles in the family entering the system will have the initial velocity defined below. By default, this value is set to a zero vector, implying no initial velocity.
- Initial Velocity
m/s | This is the initial translational velocity vector of the particles entering the system. The three fields define the x, y, and z components of the velocity vector. These vectors are aligned with the basis x, y, and z unit vectors within the system.
- Custom UDF
Under this option, all particles in the family entering the system will have an initial velocity computed at runtime from the UDF.
- Initial Velocity UDF
m/s | The UDF defines the initial velocity of particles as they are added to the system. Three outputs must be defined within the UDF: floating point variables
vx_p,vy_p, andvz_p. These output variables define the components of the initial velocity vector of the particles entering the system. This is a particle-based local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.Download Sample File:
Initial Velocity
Note
For injections at inlet boundary conditions, the initial particle velocity may be set to the inlet velocity to model a set of pre-entrained particles.
- Compute Nearest Neighbor Distribution
Computes the average nearest neighbor separation distance and nearest neighbor separation distance probability distribution function. See additional discussion in Theory: Nearest Neighbor Distribution. The Particle Output Data page describes the output for this option.
- On
Particle distribution data are computed.
- Off
Particle distribution data are not computed.
- Enable Particle Freezing
With this option, users can specify a time at which a particle set becomes fixed in space. Once frozen, all particle dynamics and any particle-particle interactions are disabled. This feature is particularly useful for creating packed beds using DEM particles and then flowing flow through the interstitial gaps. Electing to freeze the particles can improve simulation efficiency as the code no longer runs the particle-particle contact wall interaction, and position integration kernels. Once frozen, dynamics cannot be reactivated. All other updates, including scalar coupling and thermal transport, will still be considered.
- On
Enable particle freezing.
- Start Time
Time at which to being particle freezing.
- Off
Do not consider particle freezing.
- Enable Movement Control
With this option, users can define a UDF that conditionally controls whether particles are moving or fixed. Particle motion can be reactivated as part of the UDF. Control is specified on a particle-by-particle basis. This functionality only prevents updates to the particle position/velocity. All other particle physics—including particle-particle interactions, particle-scalar coupling, etc.—continue as defined.
- On
Movement control of particles is enabled. Individual particles may become fixed in space per some user-defined condition.
- Movement Control UDF
none | This UDF defines if individual particles move or remain fixed in space. One of two possible boolean outputs can be defined as part of the UDF:
makeFixedandmakeMoving. The values assigned to each value can change over time. If the booleanmakeMovingis set to true, the particle will evolve through space. Only one boolean should be true at each time step. This is a local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.Download Sample File:
Movement Contol- Off
No controlled movement of particles. Particles always have the ability to move through space.
- Compute Pressure Gradient Force
When this option is active, the pressure gradient force on the particle is calculated. This force acts from regions of higher pressure toward regions of lower pressure, influencing the motion of particles immersed in the fluid.
For a small particle within a fluid, the pressure gradient force can be expressed as:
\[F_p = - V_p \nabla P\]where \(V_p\) is the volume of the particle and \(\nabla P\) is the pressure gradient and the location of the particle.
- Off
Does not compute pressure gradient force.
- On
Computes pressure gradient force.
- Enable Removal UDF
Enable removal user-defined function.
- Removal UDF
no units | This UDF removes particles based on particle properties or local fluid conditions. One output must defined within the UDF: a Boolean variable named
remove. This output value determines if a particle is to be removed from the simulation. If set to true, the particle is removed. This is a local UDF, calculated on a particle-by-particle basis using the local particle/fluid properties.Download Sample File:
Removal
- Enable Particle Density UDF
TBA
- Off
Particle Density UDF not enabled.
- On
Particle Density UDF enabled.
- Particle Density UDF
TBA
Download Sample File:
Particle Density
DEM Particles Output Data¶
Particle output data is summarized on the Particle Output Data page. These outputs include individual particle motion and properties, ensemble statistics, spatial fields constructed from the local particle population, as well as particle exit statistics.
DEM Particles Toolbar¶
Context-Specific Toolbar Forms |
Description |
|---|---|
|
The Add Particle Injection adds an injection to a particle parent. |
|
The Add Particle Scalar tool assigns custom properties to individual particles which move with them and can be used to model intraparticle reactions. |
|
The Add Particle Reaction tool applies user-defined kinetics to each particle based on its composition and surrounding fluid properties. |
|
The Add Particle Variable tool defines per-particle quantities via UDFs, accessing particle properties and local fluid conditions. |
|
The Diagnostics form reports the position, orientation, and moments of inertia associated with a static body. |
|
The Help command launches the M-Star reference documentation in your web browser. |
 Add Particle Injection
Add Particle Injection Add Particle Scalar
Add Particle Scalar Add Particle Reaction
Add Particle Reaction Add Particle Variable
Add Particle Variable Diagnostics
Diagnostics Help
HelpSee also Child Geometry Context Specific Toolbar.
For a full description of each selection on the Context-Specific Toolbar, see Toolbar Selections.
Additional Resources¶
For more on this subject, check out the following: